
accessories
Discrete but extremely accurate microphone. This unit requires one of our preamps or similar.
Harp Pickup
The AC-SC-6 family of pickups are all based on our long standing soundboard pickup. The "v" version has added volume control "d" version has 2 independent inputs with switchable Mic/level output level - ideal for foot pedals
Acoustic Amplifier
The Accusound AMA-1 is our first and best selling acoustic amplifier. It has a powerful 170W amplifier and a full range 8" speaker. There are 2 independent inputs and a host of advanced features..
Power adaptors
Recently Accusound introduced the Dual Input Power adaptor, ACS-18-2. This power adaptor is great for those using amplifiers that require a higher than mic level input signals or if the user wishes to feed their pickup signal directly into effects pedals.
Wireless Systems
Although we generally do not stock wireless systems we are happy to supply when required.
OEM products
Accusound design and produce the vast majority of our products. As such we can also make any "special" products that you may require, Breakout box, Mute foot switch etc...
Leads
At Accusound we make all our leads in-house so whatever connectors or length you require, we can make it.
Harp Pickup
This is the new look contact strip. A vibration sensitive voltage transducer. It converts the minute soundboard vibrations into an electrical signal which is then transformed to a useable strength for full amplification.
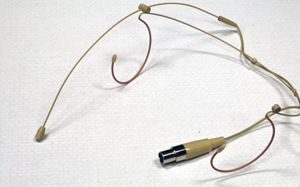
Wireless Systems
This wireless body pack allows free movement with your instrument. We can make a suitable connector for any type of cable that you require. This product will also require a wireless receiver.









Advance Featured

Viola contact tail piece mic foam mount ACS-11-2
This is the foam mount which fixes your contact microphone under the tail piece of your instrument...
 Microphone System AC-FD-12-3")
Bagpipes (3 drones) Microphone System AC-FD-12-3
The directional (hyper-cardioid) microphone system for bagpipes come in two varieties, this one for ..

Guitar sound hole clip microphone - Directional mic AC-CD-10
The directional (cardioid) sound hole clip microphone for guitar fits to the instrument by a cloths ..

Guitar Peformer Range
The performer range flexible neck microphone system for guitar, uses a directional electret micropho..
Accusound, microphones, pickups and amplifiers for all acoustic instruments.
Four simple steps to amplifying your acoustic instrument.
|
1. Take your beloved instrument, do you need it louder to compete with others in band or do you just need that little extra to be heard when playing at a wedding? Maybe you have a harp, violin, guitar ....... we have systems for just about every acoustic instrument. You won't need to drill it or damage it in anyway, everything can be removed after each performance or when you change your instrument. |

2. Don’t change your instrument add an Accusound instrument pickup. When we say "add" we really mean add, it is an addition to your instrument and is totally removeable when you have finished. All our mounts are made in-house and do not change the sound of your instrument and use no glues or screws and can be 100% removed when you don't need it. (the harp and piano pickups use double-sided tape on the inside of the soundboard) |
3. Enhance by adding any of the Accusound accessories. We can provide wireless systems to remove those trailing wires, headsets to allow freedom of movement when singing or talking between songs. We also make bespoke connection boxes or special interconnect leads, perhaps to connect to soemthing you already have, just ask and we will do what we can.
|
4. Finish off with an Accusound Acoustic amplifier. After 5 years of development Accusound can provide one of the best acoustic amplifiers available. We have three versions from which to choose, all with dual independent inputs, a variety of effects and all are capable of driving a slave speaker or front of house PA system. Everything you need either as a stage monitor and feed to the main mixer, or as amplification for smaller audiences. Try Accusound, we will provide the equipment for your application. We will also give advice on your particular situation or amplification issue. If you are not sure give us a ring or drop us an email. 07774 782503 ----- david@accusound.com
|


